2-16
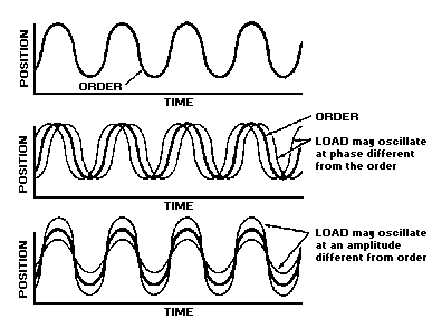
Figure 2-10.—Frequency response.
A servo may follow the order in amplitude and differ in phase; it may follow the order in phase, and
differ in amplitude; or it may differ in both phase and amplitude.
Bandpass Frequencies in a Servo system
Servos are plagued by noise signals that ride through the system on desired electrical signals. These
noise signals cause roughness in the servo system and must be eliminated to obtain smooth servo
operation.
By examining the different signals in a servo system, we can determine which frequencies are related
to the movement of the load and which ones are from noise sources, such as static, motors, harmonics,
and mechanical resonances.
Filters in the signal circuit can be used to shunt some of the unwanted frequencies away from the
amplifier, and allow only those frequencies that represent load movement to enter the amplifier. This can
also be accomplished by designing the BANDWIDTH of the servo amplifier to accept only the range of
frequencies that represents valid servo signals and to reject all others. This smooths servo response, but
has the drawback of reducing amplifier gain. Reduced amplifier bandwidth is another compromise in
achieving optimum servo operation.
Q-16. In a properly designed servo system that has an oscillating input (order), what should be the
response of the load?
Q-17. What is the advantage of designing a limited bandwidth into a servo amplifier?