2-12
(overshoot). When the load attempts to drive back to the desired position, the high gain of the amplifier
may cause it to overshoot in the opposite direction. Therefore, the system must be stabilized to minimize
or eliminate the problem of overshoot. This is done through DAMPING. Damping can be done by either
introducing a voltage in opposition to the signal voltage or placing a physical restraint on the servo
output. The actual function of this antihunting is to reduce the amplitude and duration of the oscillations
that may exist in the system. Every system has one or more natural oscillating frequencies that depend on
the weight of the load, designed speed, and other characteristics.
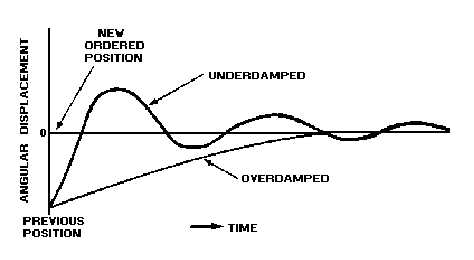
The degree of damping is determined by the purpose and the use of the system. If the system is
OVERDAMPED, it will not be bothered by oscillations. However, the large amount of restraint placed on
the servo presents an additional problem. This is an excessive time requirement for the system to reach
synchronization. Figure 2-8 is a graphic representation showing the time relationship with regard to
degree of damping.
Figure 2-8.—Degree of damping.
An UNDERDAMPED servo system has other traits. The favorable one is its instantaneous response
to an error signal. The unfavorable trait is an erratic operation around the point of synchronization
because of the low amount of restraining force placed on the servo. Somewhere between overdamped and
underdamped, there is a combination of desirable accuracy, smoothness, and moderately short
synchronizing time.
The simplest form of damping is FRICTION damping. Friction damping is the application of friction
to the output shaft or load that is proportional to the output velocity. The amount of friction applied to the
system is critical, and will materially affect the results of the system. Friction absorbs power from the
motor and converts that power to heat.
A pure friction damper would absorb an excessive amount of power from the system. However, two
available systems have some of the characteristics of a friction damper, but with somewhat less power
loss. These are the friction clutch and the magnetic clutch.
Q-12. If a position servo system tends to oscillate whenever a new position is selected, is the system
overdamped or underdamped?
Q-13. If a position servo system does not respond to small changes of the input, is the system
overdamped or underdamped?