2-14
Error-Rate Damping
Error-rate damping is a method of damping that "anticipates" the amount of overshoot. This form of
damping corrects the overshoot by introducing a voltage in the error detector that is proportional to the
rate of change of the error signal.
This "correction" voltage is combined with the error signal in the proper ratio to obtain the desired
servo operation with reduced overshooting and minimum time lag.
The advantages of error-rate damping are as follows:
1. Maximum damping occurs when a maximum rate of change of error signal is present. This
normally would occur as the servo load reverses direction.
2. Since a CHANGE in the signal causes damping, there is a minimum amount of damping when no
signal, or a signal of constant strength, is present.
Error-rate voltages are generated by either electromechanical devices or electrical networks in the
equipment. One electromechanical device widely used to generate an error-rate voltage is the tachometer
generator. As you learned previously, its output voltage is proportional to the output velocity of the servo.
Hence, the output voltage of the tachometer can be used to anticipate sudden movement changes of the
load.
The compensating electrical network used for error-rate damping consists of a combination of
resistors and capacitors forming an RC, differentiating or integrating network. You should recall that a
differentiating circuit produces an output voltage that is proportional to the rate of change of the input
voltage and that an integrating circuit produces an output proportional to the integral of the input signal.
Figure 2-9 shows a basic RC INTEGRATOR. It can be recognized by the output voltage being taken
across the capacitor. R
1
is added in this circuit to develop the transient error signal (small variation in the
signal from the error detector). The RC integrator is sometimes referred to as an INTEGRAL CONTROL
CIRCUIT and will be used to explain electrical error-rate damping.
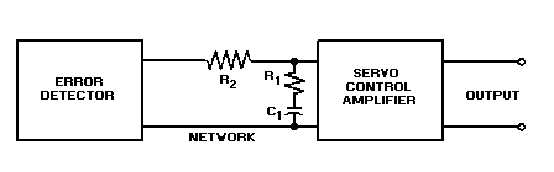
Figure 2-9.—Error rate stabilization network using an RC integrator.
The network consists of a capacitor and two resistors connected in series with the servo amplifier.
The components of this circuit are designed to work with a constant or very slowly changing error signal.
Initially, all of the error voltage is divided between R
1
and R2. But the longer the error voltage is
applied, the more C1 charges, and the greater the voltage at the input of the amplifier. Because of the RC
time of the circuit, it takes time for the capacitor to charge to the value of the error input signal. Because
of the long charge time of C1, the circuit can not respond instantaneously to a rapid change in error signal.