2-9
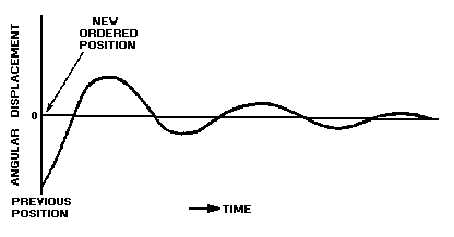
Figure 2-6.—Overtravels of the correspondence point (hunting).
Q-6. What are the three relatively common classifications of servo systems by function?
Q-7. The output of the sum point must contain information that controls what two factors of load
movement in a position servo?
Q-8. What term is used for a series of overshoots in a servo system?
Velocity Servo Loop
The VELOCITY SERVO is based on the same principle of error-signal generation as the position
servo, but there are some operational differences. Two major differences are as follows:
1. In this loop the VELOCITY of the output is sensed rather than the position of the load.
2. When the velocity loop is at correspondence or null position, an error signal is still present and
the load is moving.
This type of servo is used in applications where the load is required to be driven at a constant speed.
This speed is governed by the level of the error signal present. Radar antennas, star-tracking telescopes,
machine cutting tools, and other devices requiring variable speed regulation are all examples of the types
of load this servo may be used to drive.
Figure 2-7 is a block diagram of a velocity servo. It is similar to the block diagram of the position
servo loop except that the velocity servo loop contains a TACHOMETER in the feedback line. The
tachometer (tach) is a small generator that generates a voltage proportional to its shaft speed.