2-32
The SERVO SYSTEM is classified as a closed- loop system when it is capable of:
1. Accepting an order and defining the desired result,
2. Evaluating present conditions,
3. Comparing the desired result with present conditions and obtaining a difference or an error signal,
4. Issuing a correcting order, and changing the existing conditions to the desired result, and
5. Obeying the correcting order.
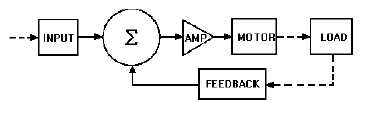
The BASIC SERVO SYSTEM is normally made up of electromechanical parts, and consists of a
synchro-control system, servo amplifier, servo motor, and some form of feedback.
The POSITION SERVO has the goal of controlling the position of the load. In the ac position servo
system, the amplitude and phase of the ac error signal determine the amount and direction the load will be
driven.
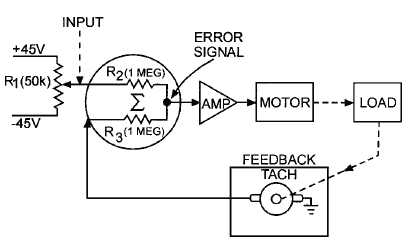
In the dc position servo system, the amplitude and polarity of the dc error signal are used to
determine the amount and direction the load will be driven.
The VELOCITY SERVO is based on the same principle of error-signal generation as the position
servo, except that the VELOCITY of the output is sensed rather than position of the load. When the
velocity loop is at correspondence, an error signal is still present, and the load is moving at the desired
velocity.