2-33
The ACCELERATION SERVO is similar to the velocity and position servos except that the
acceleration of the load is being sensed rather than the position or velocity. In this loop, the tachometer of
the velocity loop is replaced with an accelerometer.
TIME LAG is a servo characteristic defined as the time between the input of the signal and the
actual movement of the load. Time lag is undesirable and is reduced through the use of high-gain
amplifiers. Damping systems are then added to attain smooth, efficient operation.
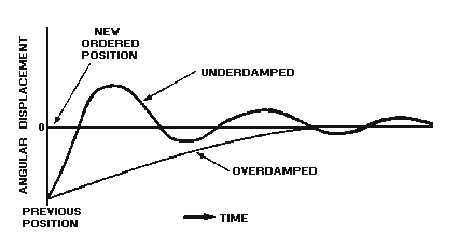
An OVERDAMPED system will not be subject to oscillations but takes an excessive amount of
time to reach synchronization. An UNDERDAMPED system provides instant response to an error signal
but results in the load oscillating about the point of synchronism. Somewhere between overdamped and
underdamped, designers achieve adequate accuracy, smoothness, and a moderately short synchronizing
time.
DAMPING is used to stabilize a system-to minimize or eliminate the problem of overshoot. The
simplest form of damping is FRICTION CLUTCH damping. MAGNETIC CLUTCH damping is similar
to friction clutch damping. The difference is in how the flywheel is coupled to the shaft of the servo
motor. Magnetic coupling uses a magnetic field to draw two friction plates together to produce damping.
Another method uses the magnetic field set up by a pair of coils or one coil in conjunction with a
conducting surface (flywheel) to produce damping.
ERROR-RATE DAMPING is defined as a method of damping that "anticipates" the amount of
overshoot. This form of damping corrects the overshoot by introducing a voltage in the error detector that
is proportional to the rate of change of the error signal. The stabilization network used for error-rate
damping consists of either an RC differentiating network or an integrating network. The components of
the RC network are chosen to tailor the stabilization network to the requirements of the servo system.