2-31
system to an open-loop configuration. At the same time, the deenergized contacts of K2 (1-3) open,
thereby breaking the closed loop. The open loop is shown by the medium density lines in the figure. This
loop is not as accurate as the closed loop, because the operator must intervene by turning the shaft of the
potentiometer back to the zero voltage position to stop the load at the desired position. This type of circuit
could be used by maintenance personnel to position the load for easy access to equipments, such as on an
antenna or gun mount. The open loop can also function as a basic velocity loop by simply not returning
the potentiometer to the zero position. This results in a constant error signal being present at the wiper
arm of the potentiometer. With this condition, the load will continue to drive at some speed (rate)
determined by the components in the loop.
The last loop we will consider is the closed-loop velocity servo, indicated by the fine density lines.
This loop is switched into operation by energizing K1. Notice that there are two inputs to the
summing network with K1 energized, the electrical input through contacts 2-4 and the feedback from the
tach through contacts 1-3. The two signals are compared in the summing network, and their difference is
used as the error signal to drive the load. When a state of equilibrium is reached in the circuit, the load
will be moving at the desired velocity.
SUMMARY
This chapter has provided information basic to understanding servo systems and their components.
The following is a summary of specific points in the chapter.
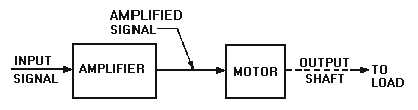
The OPEN-LOOP CONTROL SYSTEM is controlled directly, and only by an input signal. It has
no feedback and is therefore less accurate than the closed-loop control system. The open-loop system
usually requires an operator to control the speed and direction of movement of the output.
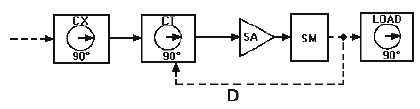
The CLOSED-LOOP CONTROL SYSTEM is the most common type used in the Navy. It can
respond and move loads quickly and with greater accuracy than the open-loop system. The closed-loop
system has an automatic feedback system that informs the input that the desired movement has taken
place.