2-29
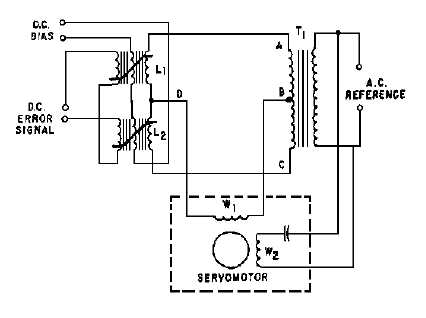
Figure 2-20.—Magnetic amplifier used to drive a servo motor.
The output of the servo amplifier is connected to one of the motor windings (controlled winding W1).
The other winding (uncontrolled winding W2) is connected across the ac source, in series with a capacitor.
The capacitor provides the required 90º phase shift necessary to cause motor rotation. The phase
relationship of the current through the two windings determines the direction of rotation of the servo
motor.
The magnetic amplifier consists of a transformer (T1), and two saturable reactors (L1 and L
2), each
having three windings. The key point to the operation of this circuit lies in the fact that the error signal
windings are connected in series-opposing while the bias windings are series-aiding.
With the circuit in the quiescent state (no input), the dc bias voltage causes the dc bias current to
equally and partially saturate both reactors (L1 and L2). The reactances of L1 and L2 now being equal
result in canceling currents through the W1 windings of the servo motor. With only one input to the
motor, it remains at rest.
Now, let's apply an error signal to the error signal windings. L2 saturates and L1 is driven further out
of partial saturation, because the error windings are in series-opposition. This results in the error signal
aiding the bias current in reactor L
2
and tending to cancel the bias current in reactor L
1. The reactance of
L2 is reduced, causing an increased current through the L2 circuitry. In the other circuit (L1), the reverse is
true; its current decreases. This imbalance in the L1 and L2 circuitry results in current flow through W1,
say from left to right, and causes the motor to turn
Reversing the polarity of the error signal causes the direction of motor rotation to change. This is
done by saturating reactor L
1
instead of reactor L2 and causing current to reverse directions through W1.
In the previous discussion, an ac motor was driven by the output of the magnetic amplifier. If a dc
motor is required in the servo to move a heavy load, the ac output from the magnetic amplifier must be
rectified.
NOTE: All of the components that have been described as units within a servo system are, in
general, the same components used in many other electronic and electrical applications. The theory of