2-2
system and the complexity of the system are directly related to the requirements of the system's
application.
Control systems are broadly classified as either CLOSED-LOOP or OPEN-LOOP.
Closed-loop control systems are the type most commonly used in the Navy because they respond and
move the loads they are controlling quicker and with greater accuracy than open-loop systems.
The reason for quicker response and greater accuracy is that an automatic feedback system informs
the input that the desired movement has taken place. Upon receipt of this feedback information, the
system stops the motor, and motion of the load ceases until another movement is ordered by the input.
This is similar to the system that controls heat in many homes. The thermostat (input) calls for heat. The
furnace (output) produces heat and distributes it. Some of the heat is "fed back" to the thermostat. When
this "feedback" raises the temperature of the room to that of the thermostat setting, the thermostat
responds by shutting the system down until heat is again required. In such a system, the feedback path,
input to output and back to input, forms what is called a "closed loop." This is a term you will hear and
use often in discussions of control systems. Because closed-loop control systems are automatic in nature,
they are further classified by the function they serve (e.g., controlling the position, the velocity, or the
acceleration of the load being driven).
An open-loop control system is controlled directly, and only, by an input signal, without the benefit
of feedback. The basic units of this system are an amplifier and a motor. The amplifier receives a low-
level input signal and amplifies it enough to drive the motor to perform the desired job. Open-loop control
systems are not as commonly used as closed-loop control systems because they are less accurate.
OPEN-LOOP CONTROL SYSTEM
As we stated previously, an open-loop control system is controlled directly, and only, by an input
signal. The basic units of this type consist only of an amplifier and a motor. The amplifier receives a low-
level input signal and amplifies it enough to drive the motor to perform the desired job.
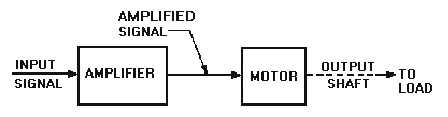
The open-loop control system is shown in basic block diagram form in figure 2-1. With this system,
the input is a signal that is fed to the amplifier. The output of the amplifier is proportional to the
amplitude of the input signal. The phase (ac system) and polarity (dc system) of the input signal
determines the direction that the motor shaft will turn. After amplification, the input signal is fed to the
motor, which moves the output shaft (load) in the direction that corresponds with the input signal. The
motor will not stop driving the output shaft until the input signal is reduced to zero or removed. This
system usually requires an operator who controls speed and direction of movement of the output by
varying the input. The operator could be controlling the input by either a mechanical or an electrical
linkage.
Figure 2-1.—Open-loop control system basic block diagram.