1-68
The SYNCHRO RECEIVER (TR) is electrically identical to the synchro transmitter. The receiver,
however, uses some form of rotor damping that is not present in the transmitter. This real difference
between a synchro transmitter and a synchro receiver lies in their applications. The receiver converts the
electrical data, supplied to its stator from the transmitter, back to a mechanical angular output through the
movement of its rotor.
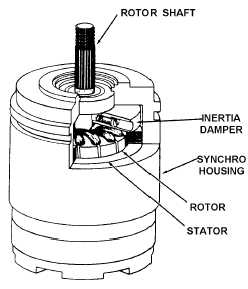
DAMPING is a method used in synchro receivers to prevent the rotor from oscillating or spinning.
There are two types of damping methods - ELECTRICAL and MECHANICAL. The electrical method is
commonly used in small synchros, while the mechanical method is more effective in larger synchros.
A TORQUE SYNCHRO SYSTEM consists of a torque transmitter (TX) electrically connected to a
torque receiver (TR). In this system, the mechanical input to the TX is transmitted electrically to the TR.
The TR reproduces the signal from the TX and positions either a dial or a pointer to indicate the
transmitted information.
CORRESPONDENCE is the term given to the positions of the rotors of a synchro transmitter and a
synchro receiver when both rotors are on 0º or displaced from 0º by the same angle.