1-24
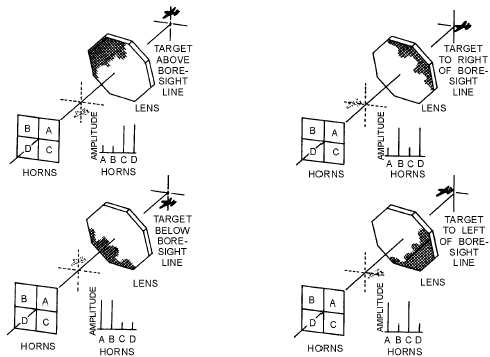
Figure 1-19.—Monopulse scanning.
The amplitude of returned signals received by each horn is continuously compared with those
received in the other horns. Error signals are generated which indicate the relative position of the target
with respect to the axis of the beam. Angle servo circuits receive these error signals and correct the
position of the radar beam to keep the beam axis on target.
The TRAVERSE (BEARING) SIGNAL is made up of signals from horn A added to C and from
horn B added to D. By waveguide design, the sum of B and D is made 180 degrees out of phase with the
sum of A and C. These two are combined and the traverse signal is the difference of (A + C) - (B + D).
Since the horns are positioned as shown in figure 1-19, the relative amplitudes of the horn signals give an
indication of the magnitude of the traverse error. The elevation signal consists of the signals from horns
C and D added 180 degrees out of phase with horns A and B [(A + B) - (C + D)]. The sum, or range,
signal is composed of signals from all four feedhorns added together in phase. It provides a reference
from which target direction from the center of the beam axis is measured. The range signal is also used as
a phase reference for the traverse and elevation-error signals.
The traverse and elevation error signals are compared in the radar receiver with the range or
reference signal. The output of the receiver may be either positive or negative pulses; the amplitudes of
the pulses are proportional to the angle between the beam axis and a line drawn to the target. The
polarities of the output pulses indicate whether the target is above or below, to the right or to the left of
the beam axis. Of course, if the target is directly on the line of sight, the output of the receiver is zero and
no angle-tracking error is produced.
An important advantage of a monopulse-tracking radar over radar using conical scan is that the
instantaneous angular measurements are not subject to errors caused by target SCINTILLATION.
Scintillation can occur as the target maneuvers or moves and the radar pulses bounce off different areas of
the target. This causes random reflectivity and may lead to tracking errors. Monopulse tracking radar is
not subject to this type of error because each pulse provides an angular measurement without regard to the