1-22
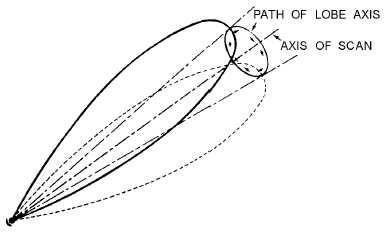
the path of the lobe axis is a circle. Within the useful range of the beam, the inner edge of the lobe always
overlaps the axis of scan.
Figure 1-17.—Conical scanning.
Now assume that we use a conically scanned beam for target tracking. If the target is on the scan
axis, the strength of the reflected signals remains constant (or changes gradually as the range changes).
But if the target is slightly off the axis, the amplitude of the reflected signals will change at the scan rate.
For example, if the target is to the left of the scan axis, as shown in figure 1-18, the reflected signals will
be of maximum strength as the lobe sweeps through the left part of its cone; the signals will quickly
decrease to a minimum as the lobe sweeps through the right part. Information on the instantaneous
position of the beam, relative to the scan axis, and on the strength of the reflected signals is fed to a
computer. Such a computer in the radar system is referred to as the angle-tracking or angle-servo circuit
(also angle-error detector). If the target moves off the scan axis, the computer instantly determines the
direction and amount of antenna movement required to continue tracking. The computer output is used to
control servomechanisms that move the antenna. In this way, the target is tracked accurately and
automatically.