3-10
3. PRECESSION (the resulting angular change of the spin axis when torque is applied).
The above quantities are related to vectors so that the relative directions may be easily compared.
The SPIN VECTOR lies along the spin axis of the rotor with an arrow indicating the direction of rotation.
The TORQUE VECTOR represents the axis about which the applied force is felt. The PRECESSION
VECTOR represents the axis about which precession occurs. In all the above cases the direction of the
vector is such that the quantity (spin, torque, or precession) is in a clockwise direction if viewed from the
tail of the vector.
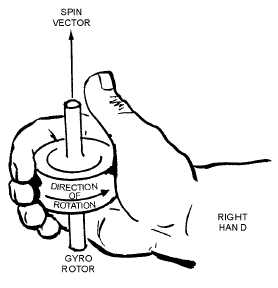
A simple hand rule will help you determine the direction of the SPIN VECTOR. (See fig. 3-9.)
Curve the fingers of your fight hand in the direction in which the rotor is turning as if you intended to
grasp the rotor. Your thumb will point in the direction of the spin vector. Similar rules will give you the
direction of the TORQUE VECTOR and the PRECESSION VECTOR. With the fingers of your right
hand wrapped in the direction of the applied torque (die direction the gyro would rotate if the rotor were
not spinning), your thumb points in the direction of the torque vector. Placing your curved fingers in the
direction of precession will place your thumb pointing in the direction of the precession vector.
Figure 3-9.—Determining spin vector direction.
All three motions are rotary (angular) and can be represented by vectors that point in such a direction
that when you look in the direction of the vector the rotary motion around the vector is clockwise.
Another hand rule convenient for determining the DIRECTION OF PRECESSION uses the fingers
of the right hand. This method may not be new to you. A similar method is applied to electric motors (see
NEETS, module 5).
You may represent the three vectors listed above by arranging the thumb, forefinger, and middle
finger of your right hand mutually perpendicular as shown in figure 3-10. Your thumb points in the
direction of the precession vector, your middle finger points in the direction of the torque vector, and your
forefinger points in the direction of the spin vector. You can consider these vectors as the axes about
which angular motion takes place. If you look in the directions your fingers and thumb point, you can
visualize that all the rotary motions are clockwise as indicated in figure 3-10.