1-70
A TORQUE DIFFERENTIAL SYNCHRO SYSTEM consists either of a TX, a TDX, (torque
differential transmitter), and a TR; or two TXs and one TDR (torque differential receiver). The system is
used in applications where it is necessary to compare two signals, add or subtract the signals, and finish
an output proportional to the sum of or difference between the two signals.
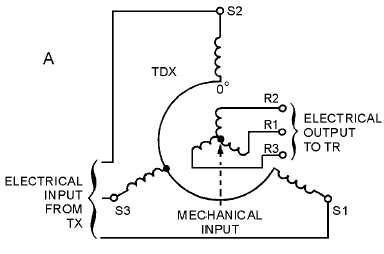
The TORQUE DIFFERENTIAL TRANSMITTER (TDX) has one electrical input to the stator
and one mechanical input to the rotor. The TDX either adds or subtracts these inputs, depending upon
how it is connected in the system, and provides an electrical output from its rotor proportional to the sum
of or difference between the two signals.
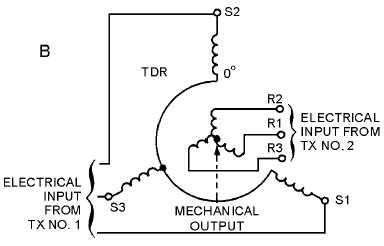
The TORQUE DIFFERENTIAL RECEIVER (TDR) is electrically identical to the TDX. The
only difference in their construction is that the TDR has some form of damping. The real difference
between the two differentials lies in their applications. The TDR has two electrical inputs, one to the rotor
and the other to the stator. The output is the mechanical position of the rotor. As is the case with the TDX,
the addition or subtraction function of the TDR depends upon how it is connected in the system.