1-28
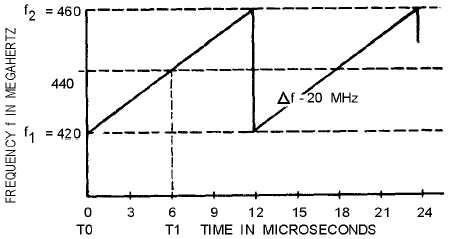
Figure 1-21.—Frequency-modulation chart.
The frequency regularly changes 40 megahertz with respect to time; therefore, its value at any time
during its cycle can be used as the basis for computing the time elapsed after the start of the frequency
cycle. For example, at T0 the transmitter sends a 420-megahertz signal toward an object. It strikes the
object and returns to the receiver at T1, when the transmitter is sending out a new frequency of 440
megahertz. At T1, the 420-megahertz returned signal and the 440-megahertz transmitter signal are fed to
the receiver simultaneously. When the two signals are mixed in the receiver, a beat frequency results. The
beat frequency varies directly with the distance to the object, increasing as the distance increases. Using
this information, you can calibrate a device that measures frequency to indicate range.
This system works well when the detected object is stationary. It is used in aircraft altimeters which
give a continuous reading of the height above the earth of the aircraft. The system is not satisfactory for
locating moving objects. This is because moving targets produce a frequency shift in the returned signal
because of the Doppler effect; this affects the accuracy of the range measurement.
PULSE-MODULATION METHOD
The pulse-modulation method of energy transmission was analyzed to some extent earlier in this
chapter. As the previous discussions indicated, radio-frequency energy can also be transmitted in very
short bursts, called pulses. These pulses are of extremely short time duration, usually on the order of 0.1
microsecond to approximately 50 microseconds. In this method, the transmitter is turned on for a very
short time and the pulse of radio-frequency energy is transmitted, as shown in view A of figure 1-22. The
transmitter is then turned off, and the pulse travels outward from the transmitter at the velocity of light
(view B). When the pulse strikes an object (view C), it is reflected and begins to travel back toward the
radar system, still moving at the same velocity (view D). The pulse is then received by the radar system
(view E). The time interval between transmission and reception is computed and converted into a visual
indication of range in miles or yards. The radar cycle then starts over again by transmitting another pulse
(view F). This method does not depend on the relative frequency of the returned signal or on the motion
of the target; therefore, it has an important advantage over cw and fm methods.