3-19
output axis that will cause the inner gimbal to exert torque against the torsion bars. The torsion bars
provide a restraining torque proportional to the amount of the inner gimbal's displacement. When the
exerted gimbal torque is exactly opposed by the restraining torque provided by the torsion bars, the inner
gimbal displacement will be proportional to the rate of rotation of the gyro case about the input axis. The
pickoff measures this displacement and provides a signal whose amplitude and polarity (or phase)
represent the direction and magnitude of the input angular velocity.
The important point to remember is that every "rate" gyro measures the RATE OF ROTATION
ABOUT ITS INPUT AXIS.
Up to this point, we have illustrated only basic gyros. We used these basic, or simple, gyros to
explain their principles of operation In actuality, the rate gyros used in typical modern day weapon
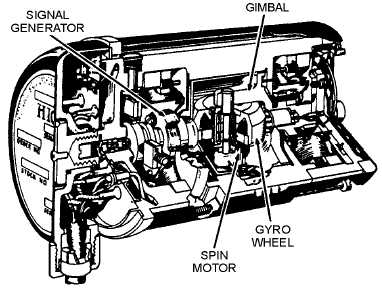
systems are considerably more complex, and in some cases, very compact. Figure 3-18 shows a cutaway
view of a rate gyro used in our Navy's missile systems and aircraft.
Figure 3-18.—Rate gyro, cutaway view.
Q-18. What are rate gyros primarily used for?
Q-19. How many degrees-of-freedom does a rate gyro usually have?
Q-20. What gyro characteristic provides the basis of the operation of a rate gyro?
ACCELEROMETERS
An accelerometer is a device that gives an indication, usually in the form of a voltage, that is
proportional to the acceleration to which it is subjected. The operation of an accelerometer is based on the
property of INERTIA (Newton's First Law of Motion). A simple demonstration of inertia happens to us
almost every day. You know that if your automobile is subjected to acceleration in a forward direction,
you are forced back in the seat. If your auto comes to a sudden stop, you are drawn forward. When your