3-13
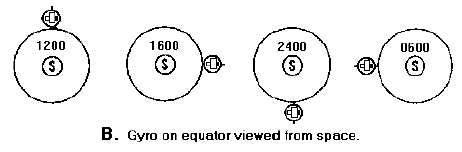
Figure 3-11B.—Fixed direction in space. Gyro on equator viewed from space.
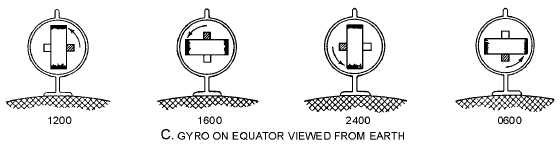
You have just imagined observing the gyro from space. Now, let's come back to Earth and stand
right next to the gyro. Look at the gyro in view C. From your viewpoint on Earth, the spinning axis
appears to make one complete rotation in one day. As you know, the gyro is rigid, and both you and the
Earth are rotating. The effect of the Earth's rotation on a gyro is sometimes called APPARENT DRIFT,
APPARENT PRECESSION, or APPARENT ROTATION.
Figure 3-11C.—Fixed direction in space. Gyro on equator viewed from earth.
Effect of Mechanical Drift
A directional error in a gyro is produced by random inaccuracies caused by mechanical drift and the
effect of the Earth's rotation (apparent drift).
We shall see later how it is corrected for in the equipment. First, let's consider the causes of
mechanical drift.
There are three general sources of mechanical drift:
1. Unbalance. A gyro often becomes dynamically unbalanced when operated at a speed or
temperature other than that for which it was designed. The static balance of the gyro is upset
when its center of gravity is not at the intersection of the three major axes. Some unbalance of
both types will exist in any gyro since manufacturing processes cannot produce a perfectly
balanced gyro.
2. Bearing friction. Friction in the gimbal bearings results in loss of energy and incorrect gimbal
positions. Friction in the rotor bearings causes mechanical drift only if the friction is not
symmetrical. An even amount of friction all around in a rotor bearing results only in a change of
the speed of rotation.