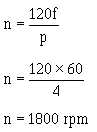
4-16
Common synchronous speeds for 60-hertz motors are 3600, 1800, 1200, and 900 rpm, depending on
the number of poles in the original design.
As we have seen before, the rotor is never able to reach synchronous speed. If it did, there would be
no voltage induced in the rotor. No torque would be developed. The motor would not operate. The
difference between rotor speed and synchronous speed is called slip. The difference between these two
speeds is not great. For example, a rotor speed of 3400 to 3500 rpm can be expected from a synchronous
speed of 3600 rpm.
SUMMARY
This chapter introduced you to the basic principles concerning ac motors. While many variations of
types exist, the three types presented provide you with background for further study if you require more
extensive knowledge of the subject. The following information provides a summary of the major subjects
of this chapter for your review.
The three AC MOTOR TYPES presented are the series, synchronous, and induction ac motors.
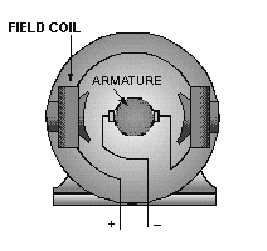
AC SERIES MOTORS are nearly identical to the dc series motors. Special construction techniques
allow ac series motors to be used as UNIVERSAL MOTORS, operating on either ac or dc power.
ROTATING FIELDS are developed by applying multiphase voltages to stator windings, which
consist of multiple field coils. This rotating magnetic field causes the rotor to be pushed and pulled
because of interaction between it and the rotor’s own field.
TWO-PHASE ROTATING FIELDS require two pairs of field coils displaced by 90º . They must
be energized by voltages that also have a phase displacement of 90º .